Clinical Research
Thank you for visiting the website of P&S Robotics Co., Ltd.
Thank you for visiting the website of P&S Robotics Co., Ltd.
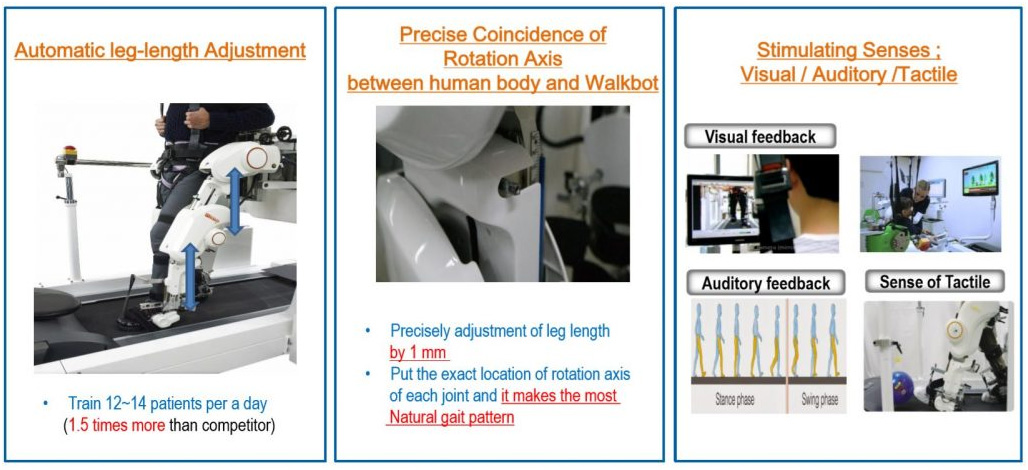
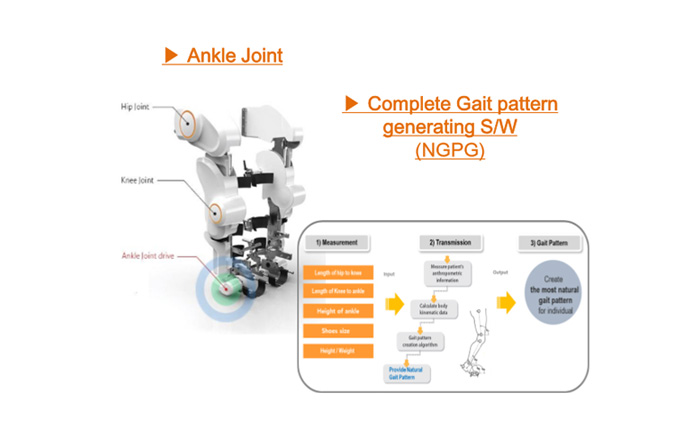
The Walkbot system is a robotic gait training device designed to support structured, repetitive, and interactive walking practice in research and rehabilitation studies. It provides coordinated assistance at the hip, knee, and ankle joints to enable consistent and reproducible movement patterns.


TEquipped with actuators at the hip, knee, and ankle, the system guides coordinated lower-limb movement and supports controlled walking patterns.
Allows high-volume, repeatable step practice in a standardized setting, which can be applied across multiple sessions.
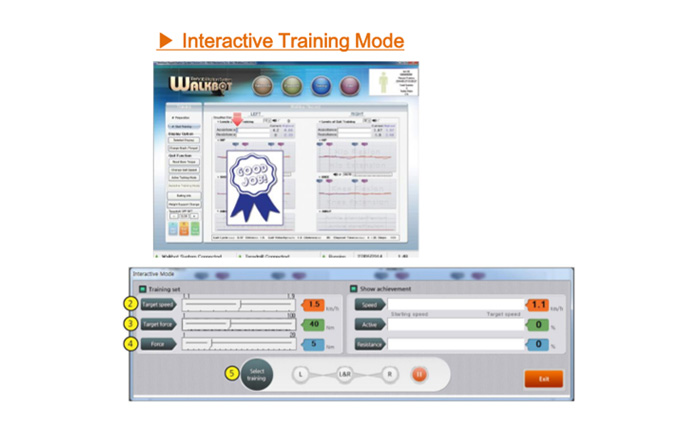
Integrates virtual and augmented reality (VR/AR) to provide engaging and motivating practice scenarios.

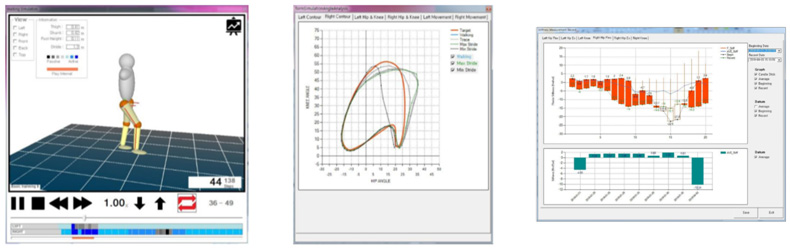
Record joint angle motion, movement mechanics, and forces during walking to helpm monitor and optimize exercise practice.
The system is designed to allow a single operator to support movement practice, reducing physical strain while enabling high-volume repetitions.