Clinical Research
Thank you for visiting the website of P&S Mechanics Co., Ltd.
Thank you for visiting the website of P&S Mechanics Co., Ltd.
Stroke is a leading cause of movement disability. Hemiparesis/hemiplegia is the most common outcome of stroke, leading to movement deficits in the contralateral limbs to the side of the brain affected by the stroke. The main clinical characteristics observed in hemiparetic patients are: weakness of specific muscles, abnormal muscle tone, abnormal postural adjustments, lack of mobility, abnormal movement synergies, loss of joint coordination, and loss of sensitivity.

Let’s check how this robotic technology works to help people with stroke patients.

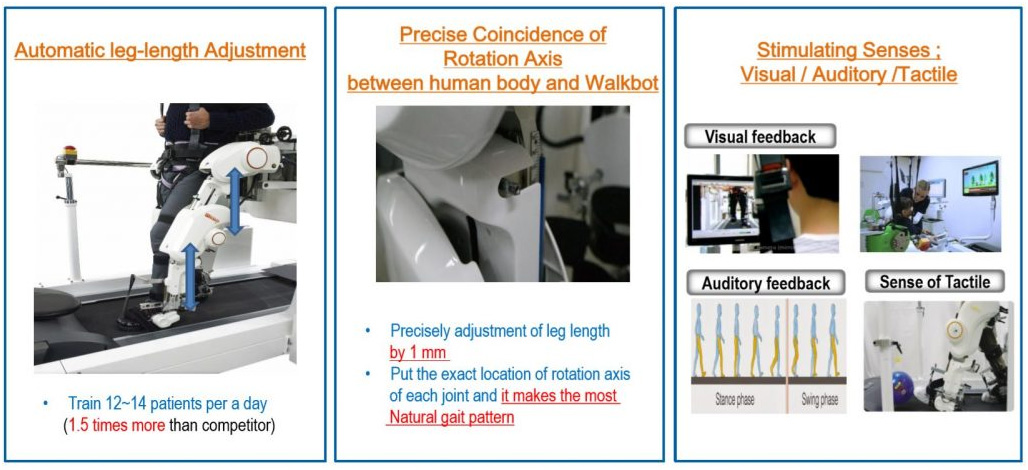
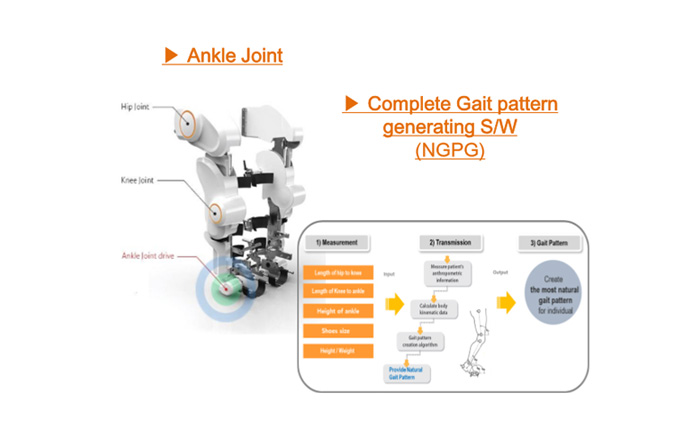
The Walkbot System is the innovative hip-knee-ankle interlimb coordinated robot training system which is designed to offer accurate proprioceptive, kinematic, and kinetic guidance, as well as variable error practice and high-intensity, repetitive task-specific, and interactive exercise for the paretic lower limb. Compared with current exoskeletal robot-assisted gait training systems, the Walkbot system is equipped with multi-segmental ankle-knee-hip joint actuators that provide an optimal, naturally coordinated, intersegmental locomotor control pattern.
Furthermore, ankle-knee-hip joint actuators facilitate ankle dorsiflexion, which prevents foot drop and associated asymmetrical circumduction or hip hiking gait, thereby enabling safe ambulation without the risk or falling.
The Walkbot system provides an intelligent interactive mode which automatically accommodates spasticity or associated stiffness, assistance and resistance forces, walking speed, and hip, knee, and joint kinetics and kinematics according to the patient’s ongoing locomotor performance to maximize ‘automatic’ locomotor relearning, retention, and full recovery.
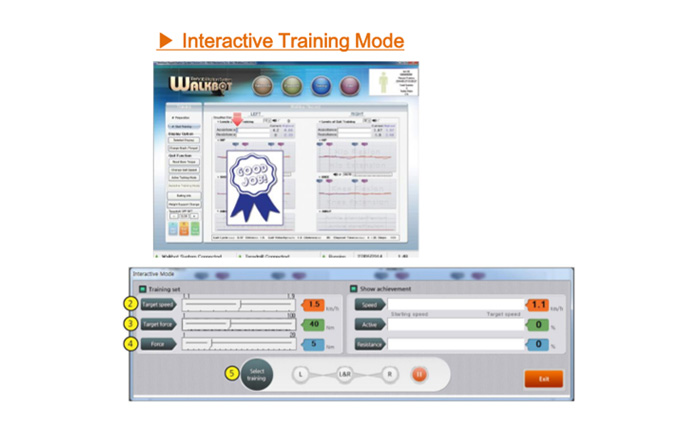
The Walkbot System is designed to provide these benefits in an enjoyable and motivational setting using virtual reality-augmented reality(VR-AR) to maximize active partition and associated locomotor recovery.

The Walkbot system can quantitatively assess kinematics, kinetics, and spasticity-related stiffness during treadmill walking. This information is utilized for sensorimotor feedback during locomotor training.
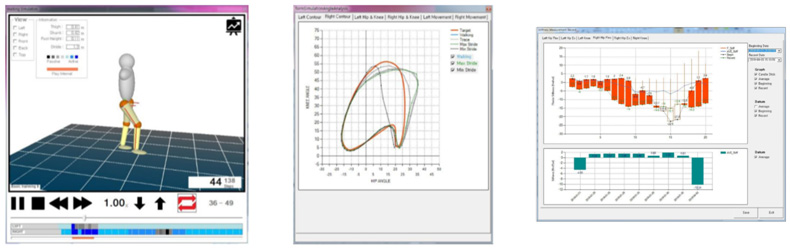
Furthermore the Walkbot system is designed to provide intensive training with minimal labor or physical stress to the therapist and provide multisensory stimulation training.