제품
㈜피앤에스미캐닉스 홈페이지를 방문해 주셔서 감사합니다.
㈜피앤에스미캐닉스 홈페이지를 방문해 주셔서 감사합니다.
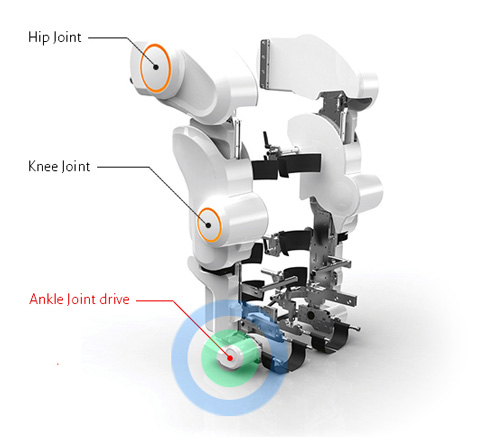
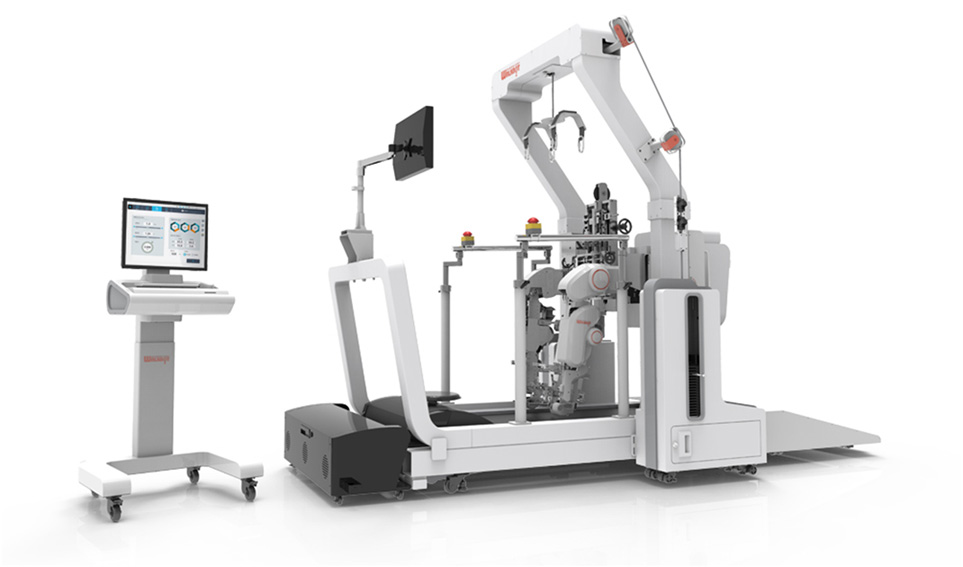
Walkbot은 세계최초의 엉덩관절(고관절), 무릎관절(슬관절), 발목관절(족관절) 3 Joint 형 보행재활로봇으로써 인간의 보행에서 가장 중요한 발목관절의 운동을 위하여 Ankle Joint Drive 기술이 탑재되어 있습니다.
Ankle Joint Drive에 의한 동기화된 엉덩관절, 무릎관절, 발목관절 3 Joint 보행훈련은 말초신경손상에 의해 발목관절에 변형이 발생한 환자들에게 올바른 보행자세와 최적화된 보행훈련을 제공합니다.
Ankle Joint Drive 착용형 로봇부는 인체 발목관절을 구성하는 주요 관절인 거퇴관절의 축과 같은 가동범위에서 운동하도록 설계하였으며 인체말단의 비틀어진 발목관절을 교정하여 엉덩관절과 무릎관절이 변형되는 것을 방지하는 중요한 역할이 있습니다.
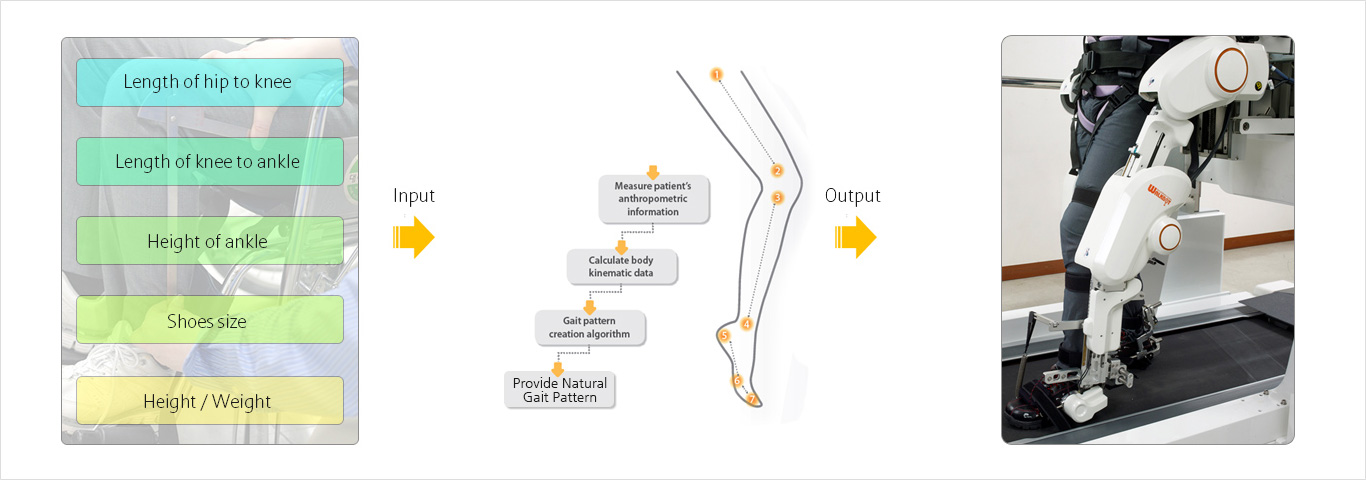
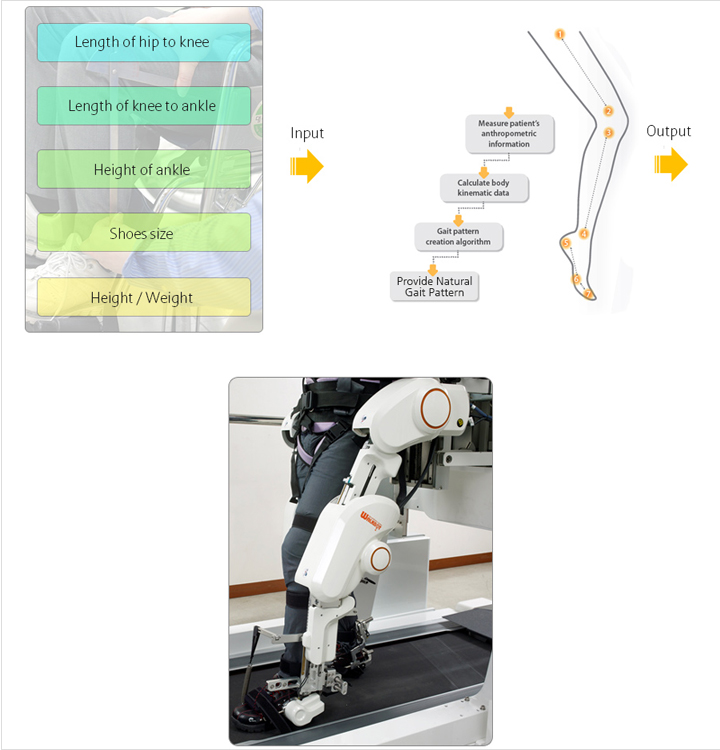
인체 보행운동역학 기반한 환자맞춤형 보행패턴생성 소프트웨어는 환자의 인체조건과 보행조건에 따라 정상인에 가까운 인간형 보행훈련 패턴을 생성하여 로봇을 작동시킴으로써 환자는 정상인의 걸음 방식으로 뇌가소성을 촉진하는 보행재활훈련을 할 수 있습니다.
인체측정학(Anthrometry)과 운동형상학(Kinematics) 측면에서 보행패턴을 생성하는 본 기술은 Walkbot 보행재활훈련에서만 제공하는 세계최고의 보행훈련 소프트웨어 솔루션입니다.
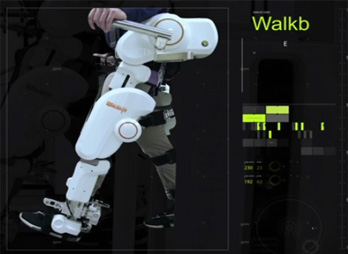
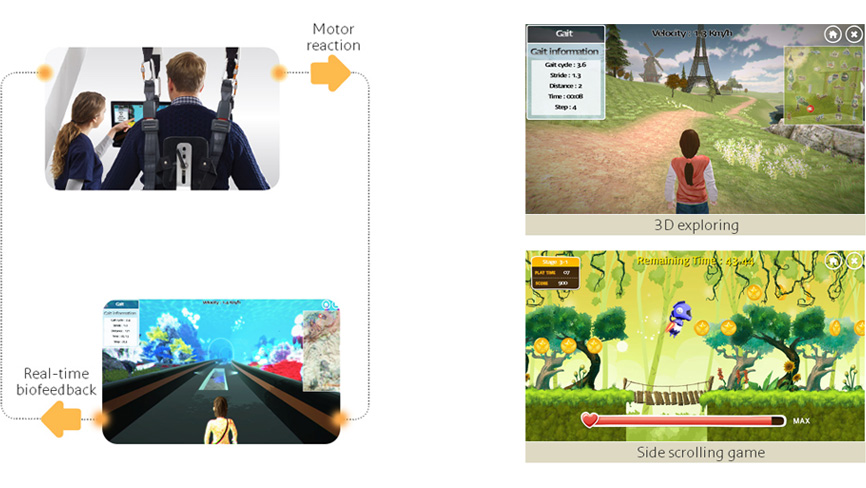
보행 훈련중인 환자의 자발적 보행훈련 참여의지를 실시간으로 감지하여 피드백하는 환자-로봇간 상호 작용힘 분석하여 피드백하는 기술이 탑재되어 있으며 이를 통해 환자가 적극적으로 훈련에 참여하도록 유도할 수 있습니다.
분석된 환자의 훈련의지에 따라 로봇이 환자를 추종하는 Assisted as needed 개념의 임피던스 제어기술이 탑재되어 환자는 부드러운 로봇관절 촉감훈련이 가능합니다. 환자의 보행의지에 기반하여 로봇의 보행훈련 속도가 자동으로 증감하는 Walkbot의 독창적인 보행훈련모드인 Interactive Training 훈련모드는 환자의 수의적고 자발적 보행훈련과 과제지향훈련의 효과를 극대화합니다.

세계최초로 로봇관절간 길이를 자동조정하는 기술이 탑재되어 경쟁사 제품에 비해 편리하고 효율적인 재활훈련이 가능하며 환자들의 다양한 신체비율에 맞춰 더욱 정확한 관절축 정렬이 가능하고 환자의 인체조건에 따라 보행패턴이 무제한 생성되어 더욱 최적화된 환자 맞춤형 보행훈련이 가능합니다.
로봇다리길이 자동조정시스템에 의해 치료준비시간이 크게 단축되었으며 치료사의 종래 로봇의 다리길이를 수동으로 조정하는 방식을 개선하여 치료사의 노력을 크게 덜 수 있게 되었습니다.
자동 조정 시스템
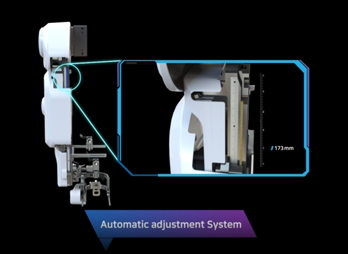
1mm 단위 자동 조정

1cm 단위 수동 조정
보행훈련중 환자의 발뒤꿈치 닿기(Heel Contact) 및 박 앞꿈치 떼기(Toe Off) 같은 특정 보행시점에 규칙적인 효과음을 들을수 있도록 하여 환자가 보행패턴을 더 잘 기억하도록 도와주며 음향효과의 발생 타이밍을 관심있는 특정 보행주기에 맞춰 조정할 수 있습니다.
보행훈련하는 환자의 모습을 실시간으로 모니터링하고 녹화하여 정면/측면에서 전체 자세 또는 발목관절의 근접 동작등 원하는 위치에서 모니터링하는 시각적 훈련을 제공합니다. 설치한 볼을 터치하는 훈련을 통해 촉각을 자극하는 훈련기능을 제공합니다.
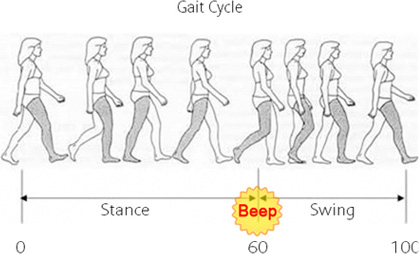
METRONOM Function
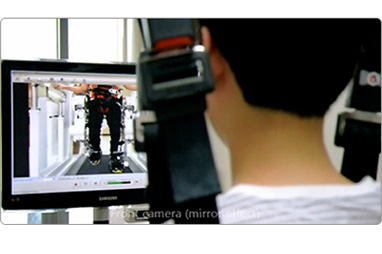
Visual monitoring
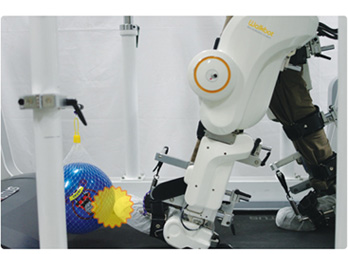
Kicking ball
3D 현실 탐험 (무료/미션)
횡 스크롤 게임
가상 환경 탐험
환자의 보행의지와 로봇의 보행속도에 연동하는 증강현실속 아바타 훈련을 통해 보행훈련의 몰입도를 향상시킬 수 있는 3종의 걷기, 1종의 게임 컨텐츠를 제공하여 환자의 공감각을 촉진하는 재활훈련이 가능합니다.
전반적인 환자맞춤형 보행훈련 절차와 준비 과정이 자동화되어 있으며 환자견인 시스템이 탑재되어 있기 때문에 환자의 물리적 신체조건이 치료사보다 월등히 큰 경우라도 1명의 치료사가 5분이내 모든 훈련준비 과정을 진행할 수 있으며 환자맞춤형 보행훈련 운영이 가능합니다. 훈련준비시간이 단축되어 실제 사례에서 통계적으로 1일 15세션 이상의 훈련이 가능하며 담당치료사 1명이 2대의 시스템을 동시 운영할 수 있습니다.
뇌졸중, SCI, TBI, 다발성경화증, 뇌성마비 및 기타 신경재활 관련 질병으로 고통받는 보행장애 환자를 위한 혁신적인 의료기기입니다. 걷기와 관련된 뇌의 한 영역이 손상되면 사람들은 걷는 방법을 잃게 됩니다.
다행히도 재활을 통해 잃어버린 보행 기억을 복원할 수 있습니다. 이를 '신경가소성'이라고 합니다. 재활의 목표는 환자의 신경가소성을 극대화하고 다시 걷는 것입니다. 로봇보행훈련은 반복연습, 집중 훈련, 과제별 훈련을 제공하며 신경가소성을 고취하는 가장 좋은 방법이라고 합니다.
보행 훈련 시스템은 뇌졸중과 같은 신경재활 관련 질환에서 특히 기존의 전통 물리치료 단독요법보다 전통물리치료와 병행 시 운동 회복에 탁월한 효과를 나타내는 것으로 나타났습니다.
로봇 보행 훈련 시스템은 기존 치료 1회 훈련 시 걷는 양에 비해 10배 이상 많은 1000보 이상 걷는 것을 제공합니다. 또한 로봇 보행 훈련 시스템은 1명의 치료사(기존 치료방법에서는 1명 이상이 필요함)만으로도 충분합니다.
마지막으로 기존 치료의 효과는 치료사의 개인 기술에 달려있지만 로봇 보행 훈련 시스템은 환자의 훈련 패턴을 재현할 수 있어 환자가 올바른 방법으로 보행을 학습할 수 있도록 합니다.
반복된 연습, 집중 훈련 및 작업 별 운동훈련은 더 나은 보행 재활 결과를 가져올 수 있다는 증거가 늘어나고 있습니다. 외골격 보행 훈련 시스템은 이 세 가지를 활성화하고 신경가소성을 장려하는 가장 좋은 방법 중 하나입니다.
로봇 보행 훈련 시스템에는 최소 세 가지 유형이 있습니다.첫 번째는 완벽하게 다시 걷는 보행 장치입니다. 이 보행 장치는 재활의료기기의 일종으로 보행장애 환자를 위한 로봇 보조 보행훈련 시스템입니다.
이 장치는 뇌졸중, 척수손상 또는 SCI, 뇌종양, 다발성경화증, 뇌성마비 등을 앓고 있는 사람들에게 적용할 수 있습니다. 환자를 걷게 하기 위해서 엉덩이와 무릎, 발목관절 가동 모터를 사용하여 환자 개인에게 자연스럽고 정확한 보행패턴을 제공합니다.이러한 방법으로 훈련 후 빠른 회복이 가능합니다. 이 보행 장치는 대화형, 기능형, 근력강화, 동기부여, 자연스런 보행 특징을 갖춘 장치로 완벽한 보행을 원하는 신경학적 또는 근골격계 장애가 있는 성인을 위해 설계되었습니다. 보행 훈련 시스템 두 번째는 어린이 환자를 위한 보행 장치입니다. 이 보행 장치는 키가 86cm에서 148cm 사이의 어린 환자를 위해 설계되었습니다. 성인과 달리 어린이의 경우 강직과 저항이 훨씬 심한 경우가 많습니다. 일부 어린이는 출생 후 걷는 경험조차 없기 때문에 더 긴 훈련시간에도 불구하고 치료 효과가 훨씬 낮습니다. 더 나은 결과를 얻기 위해 발목 구동모터를 사용하여 보행 균형과 올바른 패턴을 제공하기 위해 두 번째 유형의 보행 장치를 개발했습니다. 이 보행 장치는 이동과 관련된 관련 임상정보도 제공합니다.환자 훈련 정보에는 강직 또는 관절구축과 관련된 강직 데이터, 실시간 데이터, 엉덩, 무릎, 발목관절 훈련 데이터, 훈련 중 환자의 힘 데이터를 볼 수 있습니다. 또한 외관 디자인은 아이의 눈높이에 맞추어 설계하여 처음 장비를 사용할 때의 어려움과 부자연스러움을 최소화 하였습니다. 뿐만 아니라 연령에 맞는 증강현실 프로그램을 시스템에 통합하여 아이들의 상호작용 참여와 동기부여를 극대화합니다.세 번째는 보행훈련 시스템 장치입니다. 이 보행장치는 일종의 로봇 보조 보행훈련 재활시스템으로 신경계 또는 근골격계 장애가 있는 성인 및 소아환자에게 적합합니다. 로봇 모듈은 성인용과 소아용으로 호환되어 장착되며 보행훈련에 도움을 주는 다양한 옵션으로 훈련 효과를 극대화할 수 있습니다.

보행 훈련 시스템시스템은 관절이나 근력 문제로 인해 보행장애가 있는 사람들을 대상으로 하반신마비 환자에게 보행 경험을 제공하고 뇌졸중 및 척수손상에 대한 회복 운동을 제공하기 위해 설계되었습니다.
그러므로 대학병원, 종합병원, 재활병원, 노인병원, 산재병원, 노인복지시설 등에서 일상적으로 필요합니다.