임상연구
㈜피앤에스미캐닉스 홈페이지를 방문해 주셔서 감사합니다.
㈜피앤에스미캐닉스 홈페이지를 방문해 주셔서 감사합니다.
발목 로봇제어가 로봇 상호작용 보행훈련(RIGT)의 중요한 구성요소로 등장했지만 건강한 성인과 뇌졸중 및 대뇌를 포함한 뇌 손상이 있는 참가자의 발목 근육 활동 및 관절 각도 운동학에 대한 신경생리학적 및 생체역학적 영향을 조사한 연구는 없습니다. 마비 (CP). 본 연구는 건강한 성인과 뇌 손상 참가자를 대상으로 RIGT가 발목 로봇제어(액추에이터) 유무에 따라 발목 근육 활동 및 관절 각도 운동학에 미치는 영향을 비교했습니다. 기술적인 통계분석은 발목 제어 액추에이터가 있는 RIGT가 발목 제어 액추에이터가 없는 RIGT보다 EMG(30%) 및 운동학 각 도(25%)에 더 우수한 효과를 나타냄을 보여주었습니다.
우리의 결과는 발목 제어 액추에이터가 있는 RIGT가 뇌졸중 및 CP가 있는 참가자의 발목 제어 액추에이터가 없는 RIGT보다 신경생리학적 EMG 데이터와 발목배 측 굴곡 및 서측 굴곡 움직임을 더 효과적으로 개선할 수 있다는 새롭고 유망한 임상 증거를 제공했습니다.
불충분한 발목-무릎-엉덩이 관절 조정은 심각한 낙상 부상을 초래할 수 있기 때문에 수백만 명의 뇌 손상 환자에게 흔한 신경 역학적 장애입니다. 뇌 손상 참가자의 77~80%가 치명적인 낙상을 경험하여 사망에 이를 수 있습니다.
특히 보행시 선택적 발목 움직임의 제한이 주된 원인으로 지목되고 있다. 일상 생활의 독립적인 활동 중 균형상실 및 이와 관련된 심각한 낙상에 대해 신경 역학적으로 발목 근육계는 중후반 자세 동안 전방 모멘트 유도추진, 이 각기의 발가락 정리, 보행주기의 초기 접촉(IC) 비충격 흡수에서 중요한 역할을 합니다. 병리학적으로, 보행의 이러한 신경 역학적 측면 중 일부(또는 전부)는 뇌 손상 후손 상됩니다. 마비 또는 약한 전경 공근(TA)은 IC 및 유각기 동안 발가락이나 발을 깨끗이 하기 위해 효과적으로 활성화할 수 없습니다. Lokomat(Hocoma, Volketsiwl, Switzerland) 및 ALTACRO(Vrije Unviersiteit, Brussel, Belgium)를 포함하여 현재 상용화된 외골격 로봇은 환자의 다리가 움직임에 능동적으로 영향을 주지 않고 사전 정의된 궤적을 따라 수동적으로 움직이는 한 가지 주요 제한사항을 제시합니다. 이 문제를 완화하기 위해 우리는 독립적인 발목을 제공할 수 있는 혁신적인 발목-무릎-엉덩이 관절 조정 로봇-대화형 보행훈련 시스템 (RIGT; alkbot G 라고도 함, P&S Mechanics, 대한민국 서울)을 개발했습니다. 발 간격을 위한 엉덩이 및 무릎 액추에이터 외에 제어 액추에이터 이 장치는 전동 러닝머신 및 체중 지지대와 결합될 때 사상면에서 고관절, 무릎 및 발목관절의 움직임을 돕습니다. RIGT 개입 패러다임 동안 발목관절 제어 역할의 임상적 중요성에도 불구하고 이 전연구에서는 발목 제어 작동기가 있거나 없는 RIGT 사이의 잠재적인 임상적 이점과 기본 신경 역학적 관계를 비교하지 않았습니다. 따라서 우리는 뇌졸중 또는 뇌성마비(CP) 참가자의 TA 및 비복근(GCM) 근육 활동 및 관절운동학에 대한 발목 제어 액추에이터 유무에 따른 RIGT의 효과를 비교할 것을 제안했습니다.
Walkbot은 RIGT 장치로, 운동학 외에도 진행 중인 참가자의 성능과 토크 및 강성에 대한 실시간 시청각 바이오피드백을 기반으로 제어 매개변수를 수정하는 수동, 능동 보조 모드를 포함하여 다양한 제어 모드에서 수행하도록 설계되었습니다. 보행훈련 중 엉덩이, 무릎 및 발목관절을 지원합니다. 대상 이동 궤적은 수동모드에서 미리 정의되며 참가자는 로봇에 따라 달라집니다. 이 장치는 바디웨이트 시스템용 서스펜션하니스, 전동식 러닝머신, 액추에이터로 제어되는 외골격으로 구성됩니다. 전동 러닝머신 속도 및 토크(보조 및 저항)를 조정하여 훈련이 진행됨에 따라 사용자에게 안전하고 도전적인 운동 재훈련 모드를 제공할 수 있습니다.
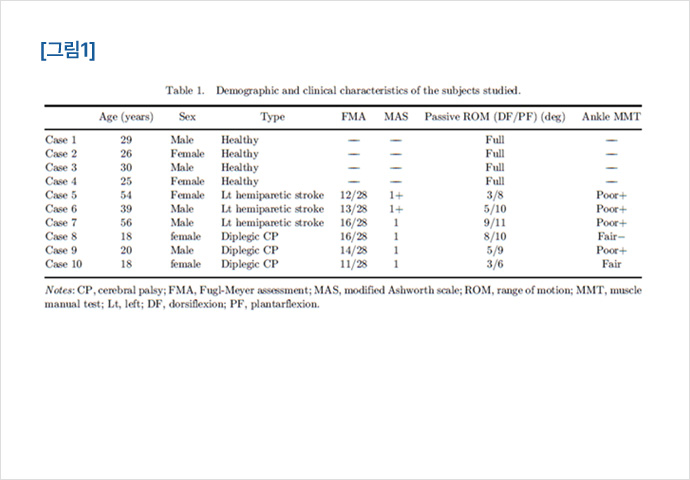
10명의 참가자 샘플(건강한 성인 4명, CP 환자 3명, 왼쪽 편마비 뇌졸중 환자 3명)이 이 연구를 위해 모집되었습니다.
모든 참가자는 발목관절 움직임과 근육 활동에 대한 임상 테스트, 표면 근전도(EMG) 및 운동학 측정을 받았습니다. 그러나 건강한 피험자의 우세 측과 편마비 뇌졸중 및 CP 참가자의 환 측에 대한 데이터를 각각 비교했습니다.
1차 임상시험에는 하지의 Fugl-Meyer 평가(FMA-LE), 수정된 Ashworth 척도(MAS), 운동 범위(ROM) 및 수동 근육 검사(MMT)가 포함되었습니다
모든 참가자는 절차를 숙지하고 테스트하기에 충분한 30분 RIGT 세션을 한번 받았습니다. RIGT에는 보행훈련 중에 독립적이고 조정된 발목, 무릎 및 고관절 액추에이터 제어장치가 장착된 Walkbot RIGT 시스템이 제공되었습니다.
Walkbot RIGT는 보행훈련 중환자의 근력, 움직임 및 피로 상태에 반응하여 전신 보조 또는 저항을 대화식으로 제공할 수 있습니다. 또한 독립적인 발목 제어 액추에이터 센서는 Lokomat와 같은 다른 RAGT 시스템과 달리 발목배 측 굴곡 및 서측 굴곡 관절 움직임을 선택적으로 분리할 수 있습니다. 체중의 약 40~60%는 참가자의 임상상태(예: 통증, 근육 약화, 경직, 및 피로) 분당 5%-10%씩 점진적으로 감소합니다. 보행속도는 1.00km/h에서 시작하여 0.1km/h씩 점차 증가하여 1.4km/h까지 증가했습니다. 액티브 어시스트와 패시브 모드는 100%(패시브 모드)부터 0%(액티브 어시스트 모드) 보조까지 시스템이 최적의 보행패턴으로 무게, 저항, 관성을 보상하여 체계적으로 제공하였습니다.
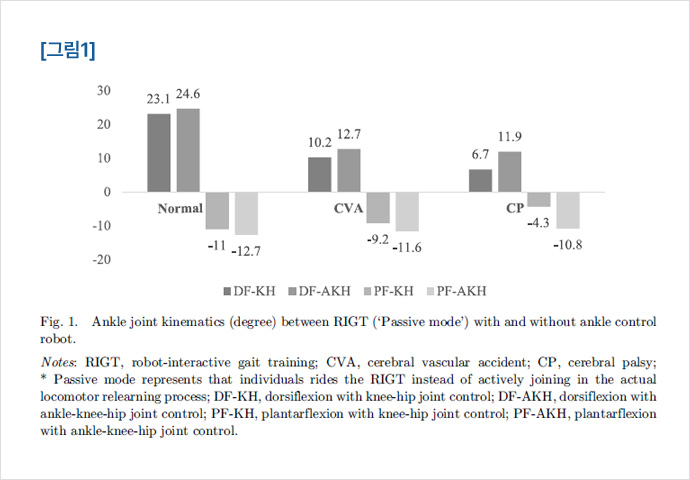
건강한 피험자에서 수동모드에서 발목 제어 액추에이터가 없는 RIGT보다 발목 제어 액추에이터가 있는 RIGT에서 우세한 다리의 배 측 굴곡 및 서측 굴곡 관절 각도가 각각 6% 및 13.4% 더 크게 증가했습니다.
발목 제어 액추에이터가 있는 수동모드 RIGT 동안 왼쪽 편마비 뇌졸중 환자에서 발목 제어 액추에이터 가 없는 RIGT보다 발목배 측 굴곡 및 서측 굴곡에서 환 측의 개선이 각각 19.6% 및 20.7% 더 컸습니다.
경련성이 중 마비 CP 환자에서 발목 제어 액추에이터가 있는 RIGT 의 수동모드 동안, RIGT는 발목 제어 액츄에이터가 없는 RIGT 동안의 경우보다 발목배 측 굴곡 및 서측 굴곡에 대해 각각 43.6% 및 60.1% 더 큰 영향을 받은 쪽의 개선이 있었습니다.[그림 1] 건강한 피험자에서 발목 제어 액추에이터가 없는 RIGT보다 발목 제어 액추에이터가 있는 RIGT 능동 보조 모드에서 우세한 다리의 배 측 굴곡 및 서측 굴곡 관절 각도가 각각 1.2% 및 8.2% 증가했습니다.
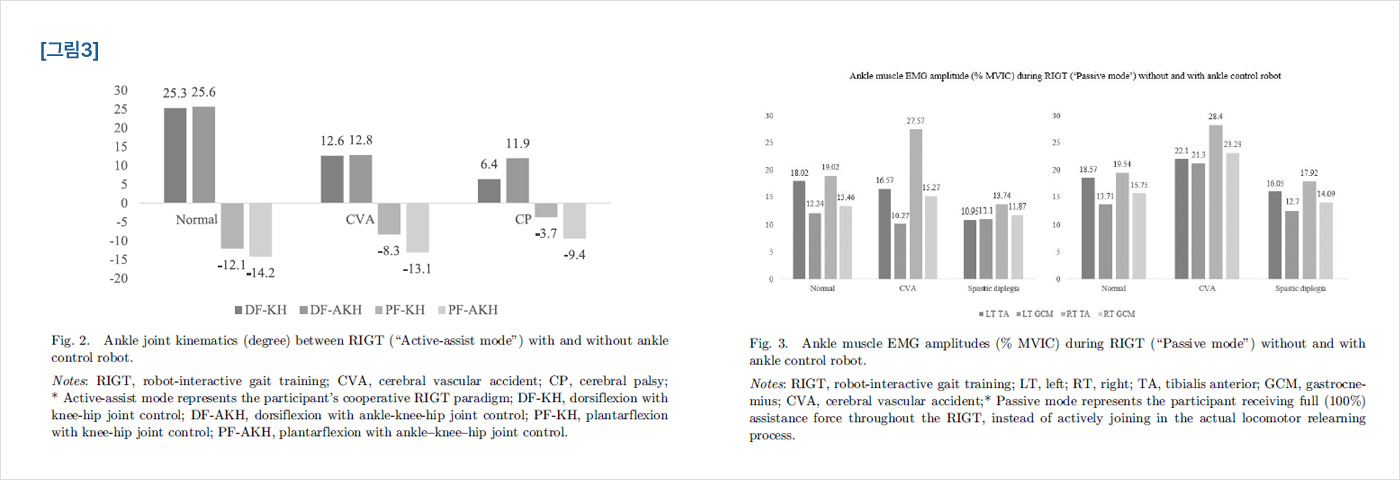
편마비 뇌졸중 사례에서 발목 제어 액추에이터가 있는 액티브 어시스트 모드 RIGT에서 발목 제어 액추에이터가 없는 RIGT보다 발목배 측 굴곡 및 서측 굴곡이 각각 1.5% 및 36.6% 증가했습니다.
경련성이 중 마비 CP 환자 에서 능동 보조 모드 동안 발목 제어 액추에이터가 있는 RIGT, 발목배 굴 및 서측 굴곡이 발목 제어 액추에이터가 없는 RIGT보다 각각 46.2% 및 65.7% 증가했습니다.[그림 2]
건강한 피험자에서 발목 제어 액추에이터가 있는 수동모드 RIGT 동안 지배적인 다리의 TA 및 GCM 근육 활동은 발목 제어 액추에이터가 없는 RIGT 동안의 RIGT보다 각각 3% 및 12% 증가했습니다.
뇌졸중 편마비 환자에서 발목 제어 액추에이터가 있는 수동모드 RIGT 동안 영향을 받는 다리의 TA 및 GCM 근육 활동 이 발목 제어 액추에이터가 없는 RIGT보다 각각 25% 및 51% 증가했습니다.
경직성 양측마비 환자에서 발목 조절 액츄에이터가 없는 RIGT보다 발목 조절 액츄에이터가 있는 수동모드 RIGT에서 더 유의한 결손이 있는 다리의 TA 및 GCM 근육 활동이 각각 31.8% 및 12.6% 증가했습니다.[그림 3]
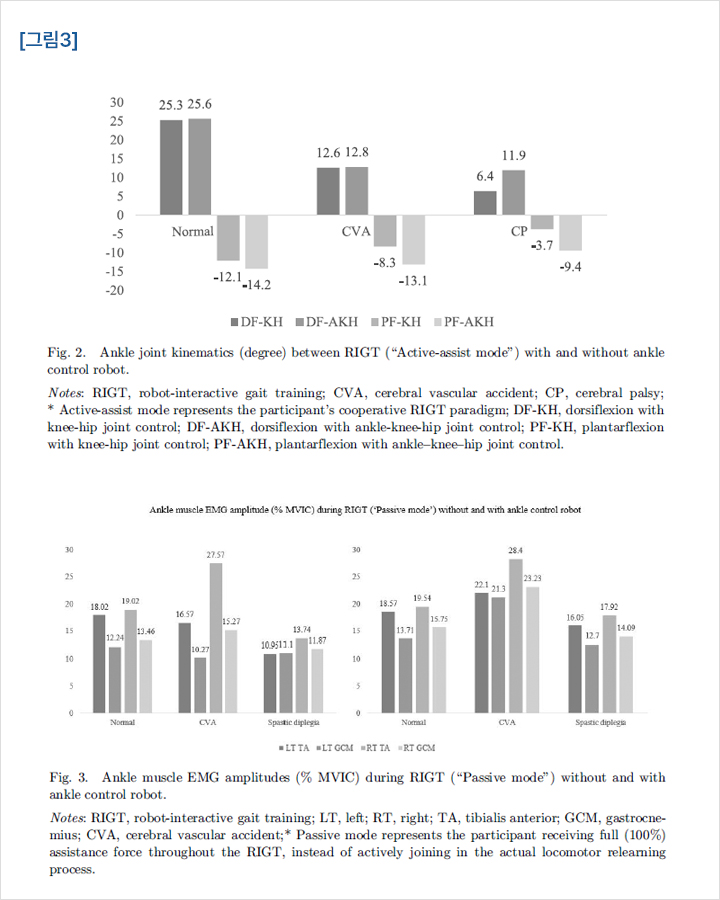
건강한 피험자에서 발목 제어 액추에이터가 있는 수동모드 RIGT 동안, 발목 제어 액추에이터가 없는 RIGT보다 지배적인 다리의 TA 및 GCM 근육 활동이 각각 1.9% RIGT 증가했습니다.
편마비 뇌졸중 환자에서 발목 제어 액추에이터가 있는 수동모드 RIGT 동안 더 큰 결손이 있는 다리의 TA 및 GCM 근육의 활동이 발목 제어 액추에이터가 없는 RIGT보다 각각 27.7% 및 16.4% 증가했습니다.
경직성 다리 마비 환자에서 발목 제어 액추에이터가 있는 수동모드 RIGT 동안 더 큰 결손이 있는 다리의 TA 및 GCM 근육의 활동이 발목 제어 액추에이터가 없는 RIGT보다 각각 41.1% 및 34.6% 증가했습니다.
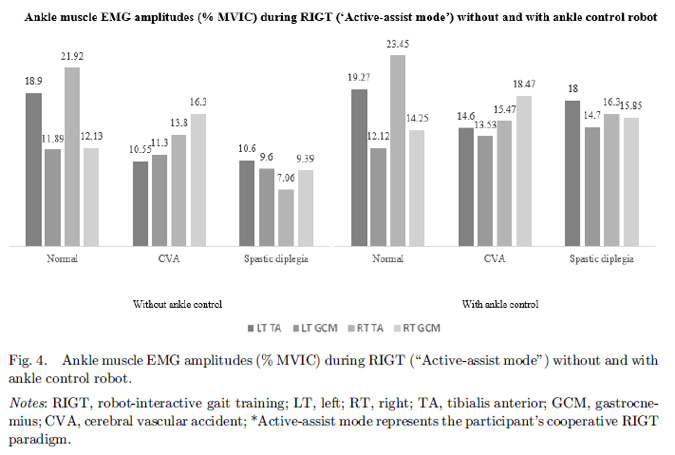
가정된 바와 같이, 액추에이터가 있는 모든 그룹 (건강한 성인 및 편마비 뇌졸중 또는 CP 참가자) 연수동 및 활성 모드 참가자 모두에서 TA 및 GCM 근육 활동 및 관절운동학의 우수한 결과를 제시했습니다.
본 연구에서 RIGT 발목관절 액추에이터 제어가 있는 RIGT 동안 입증된 발목 근육 EMG 데이터 분석은 발목관절 액추에이터 제어가 없는 RIGT 동안의 TA 및 GCM 근육 활성도를 각각 28.4% 및 31.8% 향상시켰다.
현재 연구결과는 발목 제어 액추에이터가 있는 RIGT가 뇌 손상이 있는 참가자의 이동에 필요한 고립된 발목배 측 굴곡 및 서측 굴곡운동을 개선하는데 유용한 치료 도구임을 시사합니다. 그뿐만 아니라, 발목 관절 액추에이터 제어기능이 있는 RIGT는 정확하고 조정된 고관절, 무릎 및 발목관절 간 근육 제어를 제공합니다. 따라서 발목족저굴곡보행(예를들면족저굴곡보행), 슬관절 굴곡 보행, 고관절 굴곡/내 회전 보행을 예방하는 데 적용할 수 있다.
우리의 결과는 여성의 로봇 발목 외골격과 무동력 발목 외골격의 적용을 비교한 이전 발목 근전도 연구와 일치하며, 발뒤꿈치 접촉에서 발뒤꿈치 접촉까지 발목배 측 굴곡 및 서측 굴곡 근전도 활동이 각각 67% 및 34% 증가한 것으로 보고되었습니다.
근전도 RMS 진폭은 저 활성 TA 및 GCM에서 18% 크게 증가한 반면, 과활성또는과활성측면광근및대퇴이두근에서 20-30% 감소했습니다. 이 발견은 발목 RIGT가 발목과 무릎관절 근육의 변경된 시너지 활성화를 복원하는 데 도움이 될 수 있음을 나타냅니다. 뇌 손상 사례에서 나타난 바와 같이, 운동피질 및 하행 피질척수로의 손상은 근육 약화를 초래하는 반면, 뇌간 하행 경로 및 척수 내 운동네트워크는 억제되지 않아 경직을 유발합니다. 이러한 신경근 손상은 발목-발 상호작용 및 골반 거들 운동(골반 기울기, 고관절 굴곡 및 내전)에 영향을 미치고 보행 중 무게중심의 이동에 크게 기여합니다.
본 결과는 발목 로봇제어기능이 있는 RIGT가 정확한 운동 유도력을 제공할 수 있으며, 이는 보행훈련 중에 적절한 고유수용성 피드백(예: 발목배 측 굴곡 및 서측 굴곡 관절 위치, 각도 변경) 을용 이하게 할 수 있음을 나타냅니다.
개입 후 설문조사에 따르면 참여자의 대다수가 발목배 측 굴곡 및 서측 굴곡 관절 위치 및 운동 감각에 대한 고유 수용성 피드백이 풍부하여 발목 위치 및 움직임 감각 인식이 증가한 것으로 나타났습니다. 이러한 증가된 운동감각(움직임) 감각 인식은 참여 참가자가 발목관절 액추에이터 제어가 없는 RIGT 동안의 참가자보다 발목관절 액추에이터 제어가 있는 RIGT 동안 발목배 측 굴곡 및 서측 굴곡 움직임을 더 잘 분리하는 데 도움이 되었을 수 있습니다.
이 임상 케이스 시리즈 연구는 뇌졸중이나 CP 환자들에게서 발목 제어 액추에이터를 통한 RIGT가 발목 제어 액추에이터가 없는 RIGT보다 발목 EMG 제어 도르시플렉션 및 플랜타플렉션 개선에 더 효과적임을 보여주었습니다.
우리의 결과는 발목 제어를 통한 로봇 상호 작용 보행 훈련의 활용에 대한 임상적인 증거를 제공하며, 이는 발목-무릎-엉덩이 관절 움직임 제어의 회복을 극대화하고 발전시키는 데 도움이 됩니다. 이를 통해 걷기 안전성을 향상시키고 추락을 예방하며, 따라서 생활의 질과 일상 생활 활동을 향상시킵니다.