临床研究
感谢您访问(株)P&S Mechanics网站。
感谢您访问(株)P&S Mechanics网站。
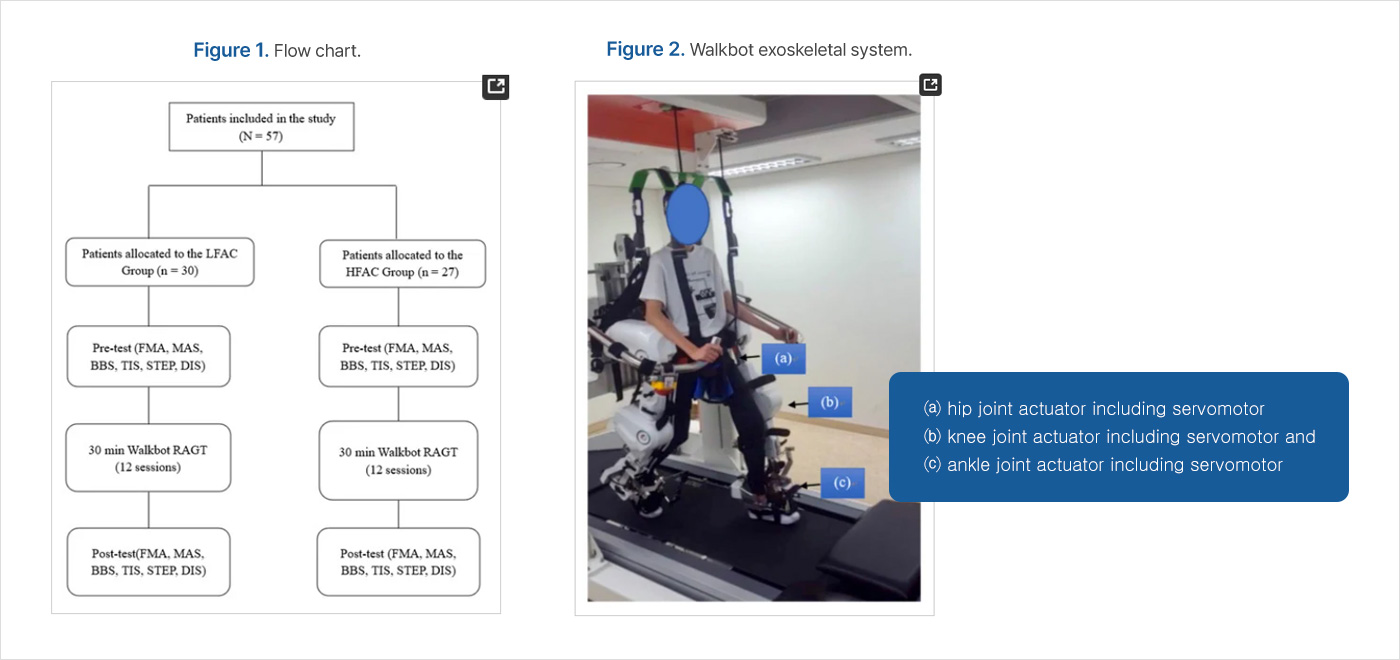
我们以FAC<2【低初期功能性步行范围(LFAC)】及FAC≥2【高初期功能性步行范围(HFAC)】的患者为对象,旨在比较机器人辅助步行训练(RAGT)对感觉运动及僵直、平衡产生的效果。
亚急性偏瘫脑卒中的躯干稳定性、步伐数及步行距离。将57名亚急性偏瘫脑卒中患者(平均年龄,63±12.72岁,女性23人)分成了两组。
所有患者均在6周内,接受了每周3次、每次30分钟的WALKBOT辅助步行训练。
外骨骼机器人辅助步行训练(RAGT)作为用于改善脑卒中偏瘫患者的步行功能的高效、有希望的治疗方式,正在快速收获人们的关注。然而,患者使用RAGT治疗的最佳时间,以及最适合初期运动机能水平的时间尚不明确。 韩国国立康复中心(National Rehabilitation Center)的报告最近强调,需要对RAGT康复干预的最佳效果与最适合时机、强度及时间等一系列特性进行评价。
决定机器人步行训练最有效的患者的初期步行水平仍然存在问题。
因此,为了给脑卒中患者带来更有效、更持续的RAGT干预效果,需要决定最佳的功能性步行范围(FAC)。
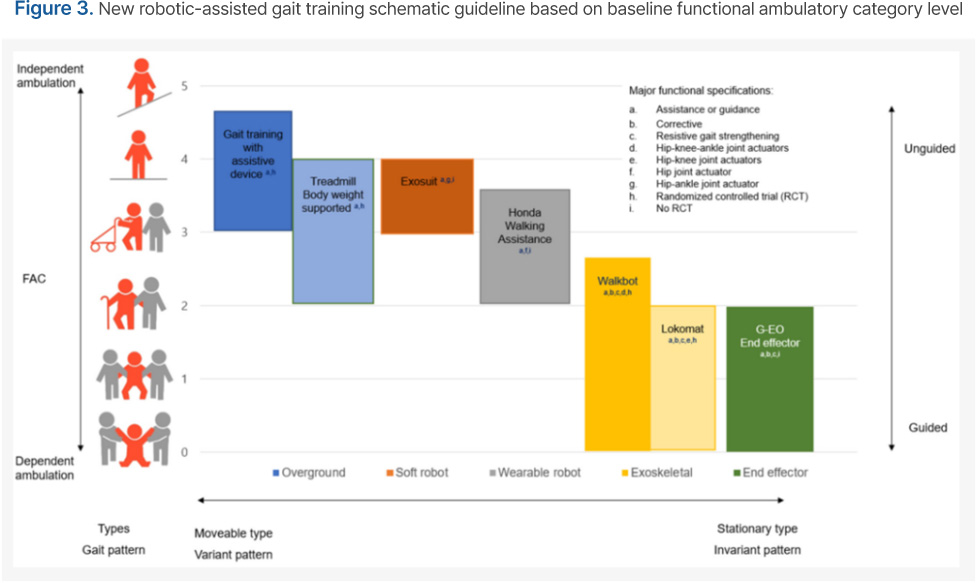
Morone在脑卒中机器人康复训练中,以初期FAC为基础,提出了最佳的对机器人步行干预类型进行分类的概念体系。包含Lokomat(Hocoma,瑞士苏黎世)及Walkbot(P&S Mechanics,韩国首尔)的外骨骼RAGT类型被指出对FAC<2(体重支持组)的脑卒中患者更加有效,并建议进行地面步行训练。 对于FAC≥2的患者(肥体重支持组),在关于外骨骼RAGT的大范围的体系研究中,Lokomat及Walkbot 使用为FAC≤2的脑卒中患者打造的引导模式(即,根据需要提供支援)或阻抗(impedance)模式,被普遍用于促进初期移动,显示出了不同的结果。特别是以亚急性脑卒中患者为对象而进行的 Lokomat RAGT研究表明步行功能得到了积极的改善。Walkbot RAGT研究表明脑卒中患者的平衡及步行功能得到了持续性的积极改善。
最近,临床研究以不可能步行的慢性后天性脑损伤患者为对象,测定并对比了Locomat和Walk机器人步行训练之间的功能平衡及下肢功能,两者表现出了相同的结果。
特别是Walkbot交互引导模式有助于活动脚腕-膝盖-髋关节,从而促进FAC<2的脑卒中患者的四肢协调性。而渐进的阻抗力(等速性)模式则可以强化脚腕。
FAC≥2的脑卒中患者的膝盖及臀部肌肉,由于这样的主张仍然有效,因此,本研究的目的在于使用以下结果,确定Walkbot RAGT对感觉运动恢复的效果。
BBS(Berg Balance Scale)基础平衡,TIS(Trunk Impairment Scale)基础躯干稳定性,FAC<2的亚急性脑卒中患者的步数及步行距离【低初期功能步行范围(LFAC)】及FAC大于等于2【高初期功能步行范围(HFAC)】
我们发现,RAGT不仅在基于FMA尺度的感觉运动恢复功能、基于MAS分出的僵直、基于BBS分数的平衡、基于TIS分数的躯干稳定性方面带来了相同的改善水平,而且两组全部如此。
本次回顾性研究包含了2017年6月至2019年9月在首尔清潭医院康复医学科住院的患者中参与RAGT治疗的患者,并将患者(±12.72岁,女性23人)分成了两组。
实验研究协议获得了清潭医院临床审查委员会及伦理委员会(IRB No. CDIRB-2021-005)的审批。参与之前,获得了所有患者的书面同意。其中包含了被分类为FAC 0-4 【FAC 0-1,(n=30);FAC 2-4,(n=27)】的亚急性脑卒中患者。
两组全部适用Walkbot-G系统,在6周时间内(共18次,最少15次),隔天进行干预,每周3次,每次30分钟。患者每次要求休息时,提供了休息时间。但是,连续处理时间最少维持了30分钟。
Walkbot系统是内置了促动器(actuator)的机器人辅助移动训练装置。该促动器可以对臀部-膝盖-脚腕进行综合的调整,确保在训练中提供最佳的臀部-膝盖-脚腕的动作轨迹。
该机器人系统专为实时探测患者的步行特性(在主动关节各位移偏位、主动力/扭矩及主动体重负荷中心压力的角度出发,参与或使用的量)而设计,可以提供精准、有激励性的实际动作。
-脚腕-膝盖-臀部运动学及动力学相关的时间反馈
具体而言,Walkbot RAGT不仅可以提供精准的고유감이각、运动学及动力学引导,还可以提供麻痹的下肢的多种错误实习及高强度、反复的、各作业的及互动式运动。最初,将RAGT体重支持(BWS)设置成了100%。在步态站立期内, 物理治疗监测膝盖状态,对整个干预期间的BWS进行了控制。步行速度最初设置为0.5km/h,逐渐增加,直至患者自己选出舒适的速度。训练期间,引导力维持在了100%。
Walkbot RAGT以外,HFAC及LFAC组全部持续接受了每天2次,每次30分钟的现有物理治疗(CPT)。CPT以神经发育治疗(NDT)为基础,包括移动性及稳定性运动、ROM运动、用于提升神经发育程度的拉伸及强化运动。
分析范围包含了顺利完成事前测试、干预(18次中,最少15次)及事后测试的所有患者。LFAC和HFAC两组之间,在标准年龄、身高、体重、脑卒中类型及偏瘫分布变数的层面,没有显著差异。
ANCOVA测试结果显示,LFAC组合HFAC组之间,
FMA分数存在显著差异(p=0.000)。通过事后分析,
干预相关的运动恢复方面,HFAC组的效果优于LFAC组
(p=0.000)。 但是,时间的主要效果没有明显差异。
ANCOVA分析表明,LFAC组合HFAC组之间,MAS没有 显著差异。时间/Walkbot RAGT对MAS无影响(p=0.816)。
ANCOVA试验显示,在LFAC组及HFAC组中,RAGT干预均显 著改变了BBS/平衡时间的主要效果(p=0.000)。
LFAC组合HFAC组之间,BBS分数/平衡水平存在显著差异 (p=0.000)。经过事后分析,确认HFAC组的平衡优于 LFAC组(p=0.000)。
ANCOVA结果表明,RAGT干预大幅改变了LFAC组及HFAC组 (p=0.026)的躯干稳定性,时间效果大幅改变了LFAC组及 HFAC组(p=0.000)的TIS分数。此外,经事后分析,确认 HFAC组躯干平衡优于LFAC组(p=0.001)。
ANCOVA证明了LFAC组合HFAC组中,时间上均带来了 显著的主要效果(p=0.000),但未观察到组的主要效果 (p=0.482)。此外,事后分析时,确认了时间的主要效果, 但是群组之间无显著差异。
ANCOVA显示,在LFAC及HFAC组中,时间均带来了显著的 主要效果(p=0.000),但未观察到组的主要效果(p=0.593)。
此外,事后分析时,确认了时间的主要效果, 但是群组之间无显著差异。
如预期一样,与基准线FAC无关,两组在Walkbot RAGT干预后,感觉运动、时间空间、平衡丧失及躯干稳定性功能方面,均有显著改善。 가장 중요한 것은 현재 연구결과가 Walkbot을 사용하는 외골격 RAGT가 초기 最重要之处在于,针对“使用walkbot的外骨骼RAGT可以对FAC低或高的亚急性麻痹脑卒中患者的平衡及步行功能供带来临床意义的变化”这一观念,当前的研究结果提出了异议。 在剂量分析中,与LFAC组(2.77)相比,HFAC组(3.78)的FMA感觉运动功能的功能分数有所提升,表明RAGT对初期步行能力好的人群更加有益。为了验证对初期步行能力低的人群的效果,Kim等(2020)人以30名亚急性脑卒 中患者为对象进行了研究。
FMA中,与现有的物理治疗相比,通过RAGT诱导的感觉运动恢复大约高出13.04%。34名亚急性偏瘫患者中,与现有的物理治疗相比,4周RAGT后,在FMA(18.27%)中观察到了类似的改善。
这种感觉运动恢复可能与运动作业相关的神经可塑性的现代神经生理学证据有关。最近,诱发神经生理学运动的潜在证据表明,在13名偏瘫性脑卒中患者中,RAGT干预后,在受到一级运动皮质(M1)影响的一侧,FMA分数和皮质脊髓兴奋性之间存在正相关关系。
类似地,功能性近红外线分光法神经影像数据表明,在15名亚急性麻痹患者中,RAGT期间,感觉运动皮质(SMC)、前运动皮质及辅助运动领域网络活性化方面有10-20%的改善。
静态、动态平衡及躯干稳定性分析显示出了显著的时间及群体效果,与初期FAC低的人群相比,FAC高的人群在功能性静态及动态平衡(11.71)及躯干稳定性(3.85)分数方面显示出了更好的 改善效果。 平衡(4.03)及躯体稳定性(0.90)。在14名亚急性麻痹患者中,与现有物理治疗相比,RAGT后BBS分数从6.6增加至26,提升显著。同时,躯体稳定性分析显示,略有改善(6.57%),这与使用RAGT(12.75%)以前TIS提升相协调。 通过这种改善的可能依据可以得知,由于患者在运动训练期间主动地交替使用上下肢的同时,需要维持直立姿势的稳定性,所以患者通过Walkbot RAGT可以恢复躯体的稳定性。
时间与空间步行分析表明,时间对LFAC和HFAC组的步行数量和步行距离均表现出显著的主要效果(两组p=0.000)。这种时间与空间的步行改善可能是由于WalkbotRAGT通过渐进被动诱导的互动式等速练习 模式充分提供了准确且重复的练习。时间与空间步行分析结果表明,LFAC及HFAC组中,时间对步数和步行距离产生了显著效果(两者p=0.000)。这种时间与空间的步行改善中,Walkbot RAGT以个人的初期 FAC及感觉运动状态为基础,通过渐进式的引导互动型等速练习模式,充分提供正确、反复的练习。迪赛伦斯及其同事提出,基于RAGT的正确且反复的运动动作练习可以长期强化神经突触的可塑性,脱离利用率较低的精神回路,促进使用替代的神经回路(例:同侧皮质脊髓、辅助运动领域,运动前区皮质),如同时间与空间的步行测量中验证过的一样,可以持续提升步行功能的恢复速度。
本次临床研究证明,在亚急性脑卒中患者中,正在恢复的LFAC及HFAC患者的感觉运动、平衡、躯干稳定性、步数及步行距离相关的功能分数得到了改善。在亚急性及脑卒中生存者的神经康复方面,为了最大程度改善感觉运动及躯干稳定性、平衡、步数、步行距离功能的功能分数,本研究结果为在初期FAC不同的患者中使用RAGT提供了基于临床依据的见解。