临床研究
感谢您访问(株)P&S Mechanics网站。
感谢您访问(株)P&S Mechanics网站。
作为机器人互动步行训练(RIGT)的重要构成要素,虽然脚腕控制促动器已经出现。但是,健康的成年人、脑卒中,以及存在大脑等脑损伤的参与者的脚腕肌肉活动及关节角度运动学相关的 神经生理学及生物力学影响的调查研究尚未进行。麻痹(CP)。本研究以健康的成人及闹存上参与者为对象,根据是否带有脚腕控制促动器,对比了RIGT对脚腕肌肉活动及关节角度的 运动学造成的影响。 技术层面的统计分析表明,与没有脚腕控制促动器(actuator)的RIGT相比,带有脚腕控制促动器的RIGT中,EMG(30%)及运动学角度(25%)显示出了更加出色的效果。
我们的研究结果提出了新的、有希望的临床证据。证据表明,在患有脑卒中及CP的参加者中,与没有脚腕控制促动器的RIGT相比,装有脚腕控制促动器的RIGT可以更有效地改善神经生理学EMG 数据、脚腕背屈及跖屈动作。
脚腕-膝盖-髋关节调整不充分时,可能导致严重的摔伤。因此,对数百万名的脑损伤患者而言,这是常见的神经力学障碍。77~80%的脑损伤患者可能经历致命的摔伤而导致死亡。
选择性踝关节运动的限制,特别是在步态期间,已被确定为一个主要的促成因素。从神经力学的角度看,对于独立的日常生活活动中的平衡感丧失和相关的严重跌倒,踝关节肌肉组织在中晚期站立时的向前推动力、倒立时的脚趾清理和步态周期的初始接触(IC)非冲击性吸收方面起着重要作用。 从病理学角度看,脑损伤后步态的这些神经力学方面的某些(或全部)都受到损害。瘫痪或虚弱的胫骨前肌(TA)不能有效地激活,以在IC和站立阶段清除脚趾或脚掌。 目前市面上的外骨骼机器人,包括Lokomat(Hocoma, Volketsiwl, Switzerland)和ALTACRO(Vrije Universiteit, Brussel, Belgium),都有一个主要限制:病人的腿被动地沿着预定的轨迹移动,而不会主动影响运动。为了缓解这个问题,我们开发了一个创新的踝-膝-髋关节协调机器人-交互式步态训练系统(RIGT;也称为alkbot G;P&S Mechanics,韩国首尔),除了臀部和膝盖的驱动器外,还可以提供一个独立的脚踝来清除脚步。 当与电动跑步机和重量支持相结合时,该设备促进了髋、膝和踝关节在火力面的运动。尽管在RIGT干预范式中,踝关节控制的作用具有临床重要性,但以前的研究并没有比较带和不带踝关节控制致动器的RIGT的潜在临床益处和潜在的神经力学关系。 因此,我们提议比较带和不带踝关节控制致动器的RIGT对中风或脑瘫(CP)参与者的TA和腓肠肌(GCM)肌肉活动和关节运动的影响。
Walkbot作为一种RIGT装置,除了运动学之外,其以正在进行的参与者的性能、扭矩及刚性相关的实时视觉听觉的生物反馈为基础,可以在控制参变量的被动及主动辅助模式等多种控制模式下执行。
步行训练中,对臀部、膝盖及脚腕关节提供支撑。被动模式中,对象移动轨迹被提前定义,每种机器人都对应不同的参加者。 该装置由体重系统用悬挂装置、电动跑步机、 促动器控制的外骨骼构成。 调整电动跑步机的速度及扭矩(辅助及阻抗),进行训练。因此,可以提供给患者安全、有挑战性的运动再训练模式。
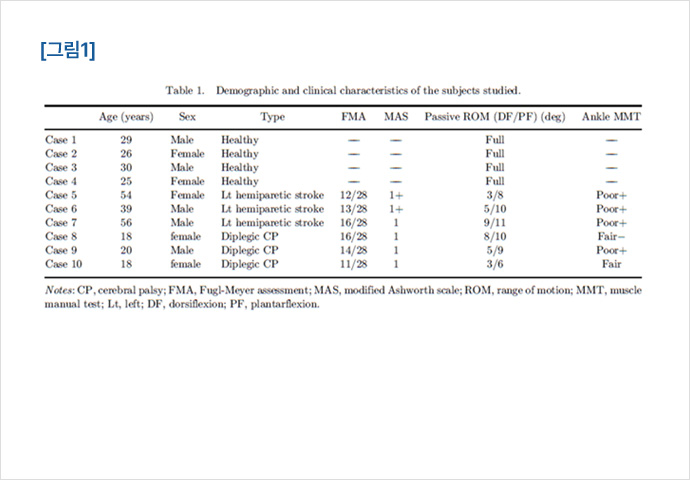
招募了10名参加者样本(4名健康的成年人、3名CP患者、3名左侧偏瘫脑卒中患者),用于开展本次研究。
所有参与者均接受了关于脚腕关节运动及肌肉活动的临床测试、表面肌电图(EMG)及运动学测定。但是,分别比较了健康的受试者的优势侧,以及偏瘫脑卒中及CP参加者的患病一侧的数据。
第1次临床试验包含下肢的Fugl-Meyer评价(FMA-LE)、改良Ashworth量表(MAS)、运动范围(ROM)及徒手肌力检查(MMT)。
所有参与者都熟悉流程,并且接受了足以进行测试的30分钟的RIGT训练。RIGT提供了Walkbot RIGT系统,该系统安装了独立于步行训练中,且经过调整的脚腕、膝盖及髋关节促动器控制装置。
Walkbot RIGT可以对步行训练中的患者的肌力、运动及疲劳状态做出反应,以交互的方式提供全身辅助或阻抗。
此外,不同于Lokomat等其他的RAGT系统,独立的脚腕控制促动器传感器可以选择性地分离脚腕背屈及跖屈关节运动。根据参加者的临床状态(例:疼痛、肌肉弱化、僵直及疲劳),以每分钟5~10%的 速度渐进式地减少体重的约40~60%。 步行速度从1.00km/h开始,以0.1km/h的速度逐渐增加,最终增加到了1.4km/h。主动辅助模式和被动模式从100%(被动模式)到0%(主动辅助模式),系统通过最适合的步行方式,对重量、阻抗、惯性进行补偿,提供体系化的控制。
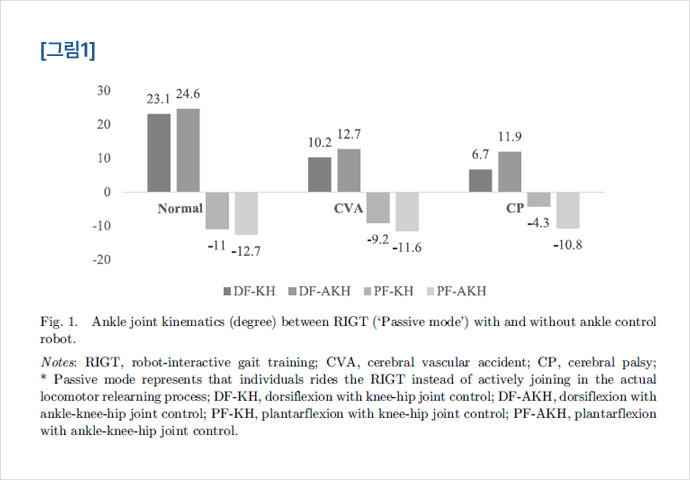
健康的受试者中,在被动模式下,相比于没有脚腕控制促动器的RIGT,使用有脚腕控制促动器的RIGT时,优势一侧腿的背屈及跖屈关节角度分别增加了6%及13.4%。
在有脚腕控制促动器的被动模式RIGT下,相比于没有脚腕控制促动器的RIGT,左侧偏瘫脑卒中患者脚腕背屈及跖屈中,患侧的改善分别高出了19.6%及20.7%。
痉挛性中度麻痹CP患者中,有脚腕控制促动器的RIGT的被动模式期间,相比于没有脚腕控制促动器的RIGT的情形,对于脚腕背屈及跖屈,改善分别高出了43.6%及60.1%
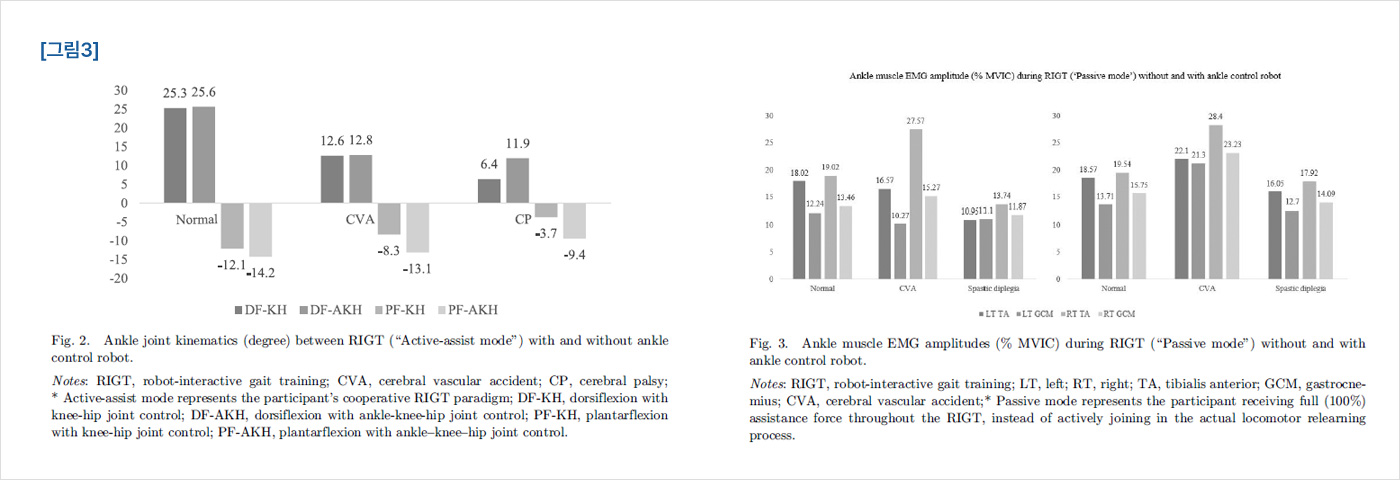
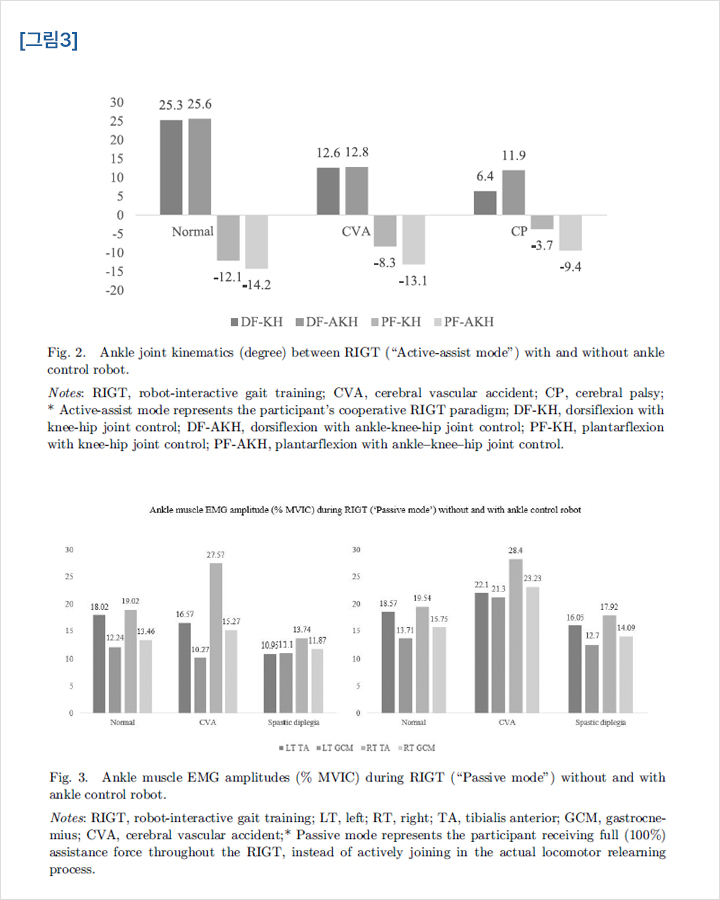
【图1】健康的受试者中,相比于没有脚腕控制促动器的RIGT,在有脚腕控制促动器的RIGT主动辅助模式下,优势腿一侧的背屈及跖屈关节角度分别增加了1.2%及8.2%。
麻痹性脑卒中事例中,在有脚腕控制促动器的主动辅助模式RIGT下,相比于没有脚腕控制促动器的RIGT,脚腕背屈及跖屈分别增加了1.5%及36.6%。
痉挛性中度麻痹CP患者中,主动辅助模式期间,有脚腕控制促动器的RIGT,其脚腕背屈及跖屈比没有脚腕控制促动器的RIGT分别增加了46.2%及65.7%。【图2】
健康的受试者中,在有脚腕控制促动器的被动模式RIGT下,相比没有脚腕控制促动器的RIGT,支配性腿的TA及GCM肌肉活动分别增加了3%及12%。
脑卒中偏瘫患者中,在有脚腕控制促动器的被动模式RIGT下,相比于没有脚腕控制促动器的RIGT,受影响的腿的TA及GCM肌肉活动分别增加了25%及51%。
僵直性双侧麻痹患者中,相比于没有脚腕调节促动器的RIGT,有脚腕调节促动器的被动模式RIGT中,损伤更严重的腿的TA及GCM肌肉活动分别增加了31.8%及12.6%。【图3】
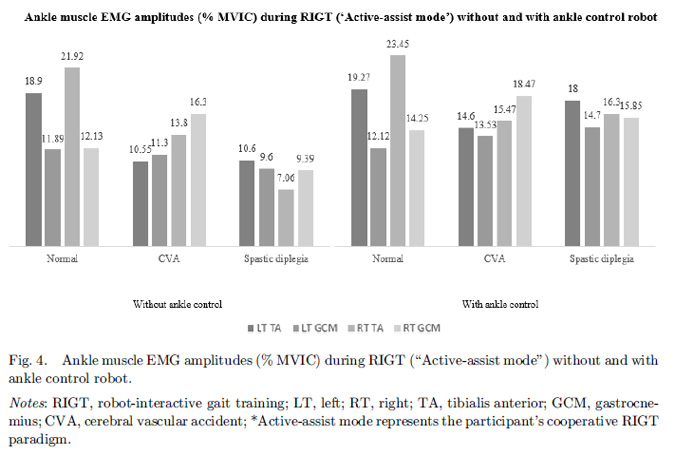
健康的受试者中,在有脚腕控制促动器的被动模式RIGT下,相比于没有脚腕控制促动器的RIGT,支配性腿的TA及GCM肌肉活动分别增加了1.9%。
偏瘫脑卒中患者中,在有脚腕控制促动器的被动模式RIGT下,相比于没有脚腕控制促动器的RIGT,损伤更严重的腿的TA及GCM肌肉的活动分别增加了27.7%及16.4%。
僵直性腿部麻痹患者中,在有脚腕控制促动器的被动模式RIGT下,相比于没有脚腕控制促动器的RIGT,损伤更严重的腿的TA及GCM肌肉的活动分别增加了41.1%及34.6%。
正如假设的一样,所有有促动器的组(健康的成人、偏瘫脑卒中或CP参加者)中,在被动及活性模式下,所有参与者的TA及GCM肌肉活动、关节运动学都表现出了优秀的结果。
本研究中,在有RIGT脚腕关节促动器控制的RIGT下,与没有脚腕关节促动器控制的RIGT期间相比,经验证,TA及GCM肌肉活性度分别增加了28.4%及31.8%。
当前研究结果提示,在改善有脑损伤的参加者的移动所需的鼓励的脚腕背屈及跖屈运动时,有脚腕控制促动器的RIGT是有效的治疗工具。不仅如此,有脚腕关节促动器控制功能的RIGT还可以在准确且调整后 的髋关节、膝盖及脚腕关节之间提供肌肉控制。 因此,适用于预防脚腕足底屈曲步行(例如,足底屈曲步行)、膝关节屈曲步行、髋关节屈曲/内旋步行。
我们的结果与之前对比女性适用的机器人脚腕外骨骼与无动力脚腕外骨骼的脚腕肌电图研究一致。据报道,从脚后跟解除到脚后跟解除,脚腕背屈及跖屈肌电图活动分别增加了67%及34%。
在低活性TA及GCM中,肌电图RMS振幅大幅增加18%。相反,在过度活性或过度活性侧肌及股二头肌中,肌电图RMS减少20-30%。这一发现表明,RIGT有助于恢复脚腕及膝关节肌肉的变化后的 协同活性。如脑损伤事例所示,运动皮质及下行皮质脊髓的损伤会导致肌肉弱化。相反,脑干下行通路及积水内运动网络不受抑制,诱发僵直。这些神经肌肉损伤会影响脚腕及脚的协同及骨盆带运动 (骨盆斜度、髋关节屈曲及内旋),并对步行过程中的中心移动产生明显影响。
本结果表明,有脚腕机器人控制功能的RIGT可以提供准确的运动诱导力。这可以使步行训练中适合的本体感觉反馈(例:脚腕背屈及跖屈关节位置、角度变更)更加容易。
干预之后,问卷调查结果显示,大多数参与者的脚腕背屈及跖屈关节位置及运动感觉相关的本体感觉反馈较为丰富,脚腕位置及动作感觉认知有所增加。
相比于没有脚腕关节促动器控制的RIGT,有脚腕关节促动器控制的RIGT期间,这种增加的运动感觉(运动)感觉认知可以帮助参加者更好地分离脚腕背屈及跖屈运动。
临床事例系列研究证明,脑卒中或CP患者中,相比于没有脚腕控制促动器的RIGT,有脚腕控制促动器的RIGT可以有效改善脚腕肌电图控制背屈及跖屈。
在最大程度恢复脚腕-膝盖-髋关节运动控控制,提升步行安全,防止摔伤,提升生活质量方面,我们的结果以使用脚腕控制结合机器人互动式运动训练的临床证据为基础,提供了新的见解。