临床研究
感谢您访问(株)P&S Mechanics网站。
感谢您访问(株)P&S Mechanics网站。
中风是运动障碍的主要原因,偏瘫/半身不遂是中风最常见的后果,导致相对于受中风影响的一侧大脑的对侧肢体出现运动障碍。在偏瘫患者中观察到的主要临床特征是特定肌肉无力、肌张力异常、姿势协调异常、缺乏活动能力、运动协同异常、关节协调丧失和敏感性丧失。

因此,康复的目标是促进中风后受试者失去的功能的恢复,并允许独立和早日重新融入社会和家庭生活。 中风后的病人需要持续的医疗护理和密集的康复,需要与物理治疗师进行一对一的手动互动。不幸的是,目前的需求和预算限制不允许进行这样的强化康复。 因此,需要新的技术来提高中风后康复的功效和效果。
现有的科学文献表明,最有效的康复干预措施是那些提供早期、密集、特定任务和多感官刺激的干预措施。 好消息是,有一种针对中风患者的创新疗法,称为Walkbot。

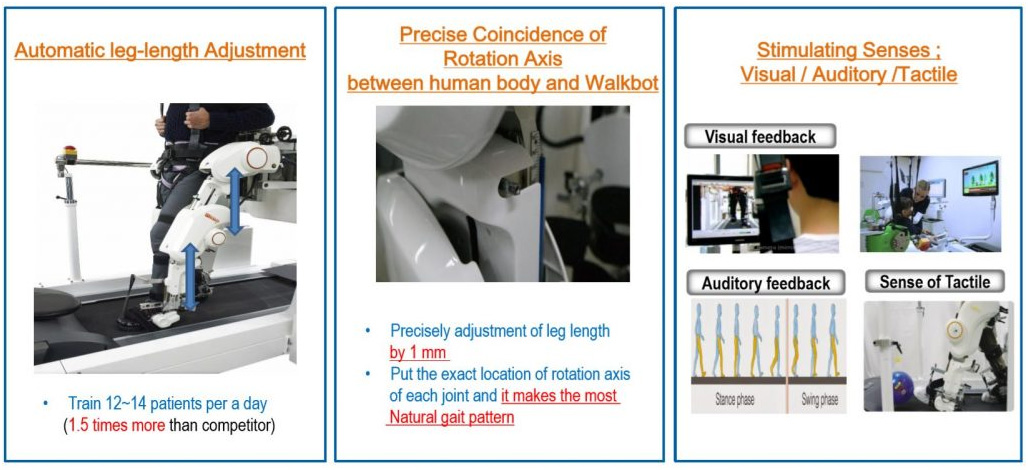
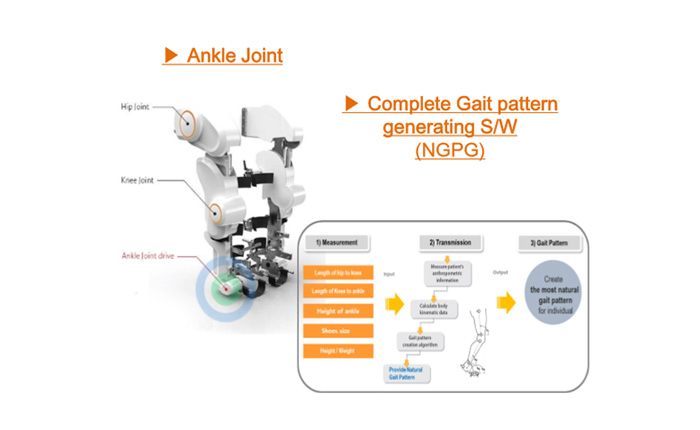
训练系统,旨在提供准确的本体感觉、运动学和运动学指导,以及错误练习和高强度、特定任务和互动练习。与目前的外骨骼机器人辅助步态训练系统相比,Walkbot系统配备了多段式踝膝髋关节驱动器,以提供最佳的、自然协调的段间运动控制模式。此外,踝-膝-髋关节驱动器促进了踝关节背屈,以防止脚落下和相关的不对称转弯或臀部徒步步态,使安全行走没有风险或跌倒。
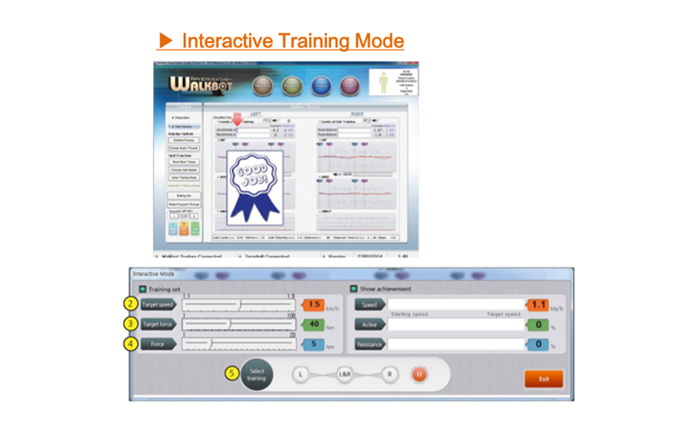
智能互动模式,自动适应僵硬或相关的僵硬,协助和阻力,步态速度,髋关节、膝关节和关节运动学和基于病人正在进行的移动性能的运动学,以最大限度地保持。
和完全恢复。
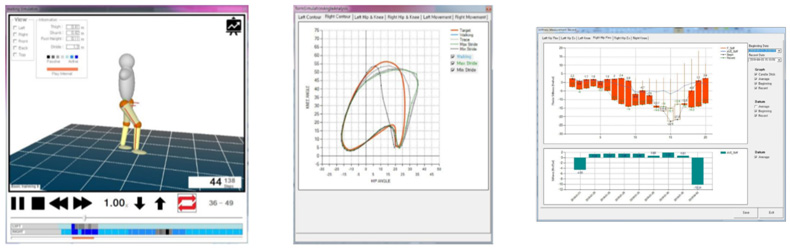
(虚拟现实增强现实),在一个愉快和激励的环境中提供这些好处,旨在最大限度地提高主动分割和相关运动恢复。

定量评估运动学和与僵化有关的僵化。这些信息在运动训练中被用于感觉运动反馈。
Walkbot系统还被设计用来提供强化训练和多感官刺激,而对治疗师的劳动或身体压力最小。